











![ELF 2 [主控:RK3588]](/storage/20241127/6746808ef36ed.png)
![ELF2_Lite [主控:RK3576]](/storage/20260105/695b71ecdd6ef.png)
![ELF-RV1126B [主控:RV1126B]](/storage/20260105/695b8a5bd7193.png)
![ELF-RK3506 [主控:RK3506B]](/storage/20260105/695b9a72f304d.png)
![ELF 1S [主控:i.MX6ULL]](/storage/20230915/650415d4d8d83.png)
![ELF 1 [主控:i.MX6ULL]](/storage/20230915/6504156616031.png)


搜索



飞凌嵌入式携手瑞芯微正式加入2025年全国大学生嵌入式芯片与系统设计竞赛,并在应用赛道中设立专属赛题。双方选用基于瑞芯微RK3588芯片设计的ELF 2开发板作为参赛平台,旨在通过此次合作,促进产教融合,共同推动嵌入式系统创新人才的培养。
本届大赛共吸引500余支队伍选择了瑞芯微&飞凌嵌入式赛题。经过线上初审与分赛区复赛的严格筛选,最终64支队伍脱颖而出,晋级全国总决赛,其中10支队伍荣获全国一等奖。


传统座舱系统存在操作复杂、视觉依赖度高、语义理解能力弱三大短板。
本项目基于【RK3588】ELF 2开发板高性能平台,构建了一款面向车载场景的多模态人机交互系统。系统集成疲劳监测、面部解锁、哨兵监控等近十项功能模块,支持语音与触觉融合操作,交互自然高效。通过引入大语言模型作为语音中枢,系统具备出色的自然语言理解能力,能够精准响应用户的口语化指令,实现无需视觉干预的智能控制,有效提升驾驶安全性与使用便捷性。同时,系统响应迅速、支持模块化扩展,具备良好的实用价值与推广前景。

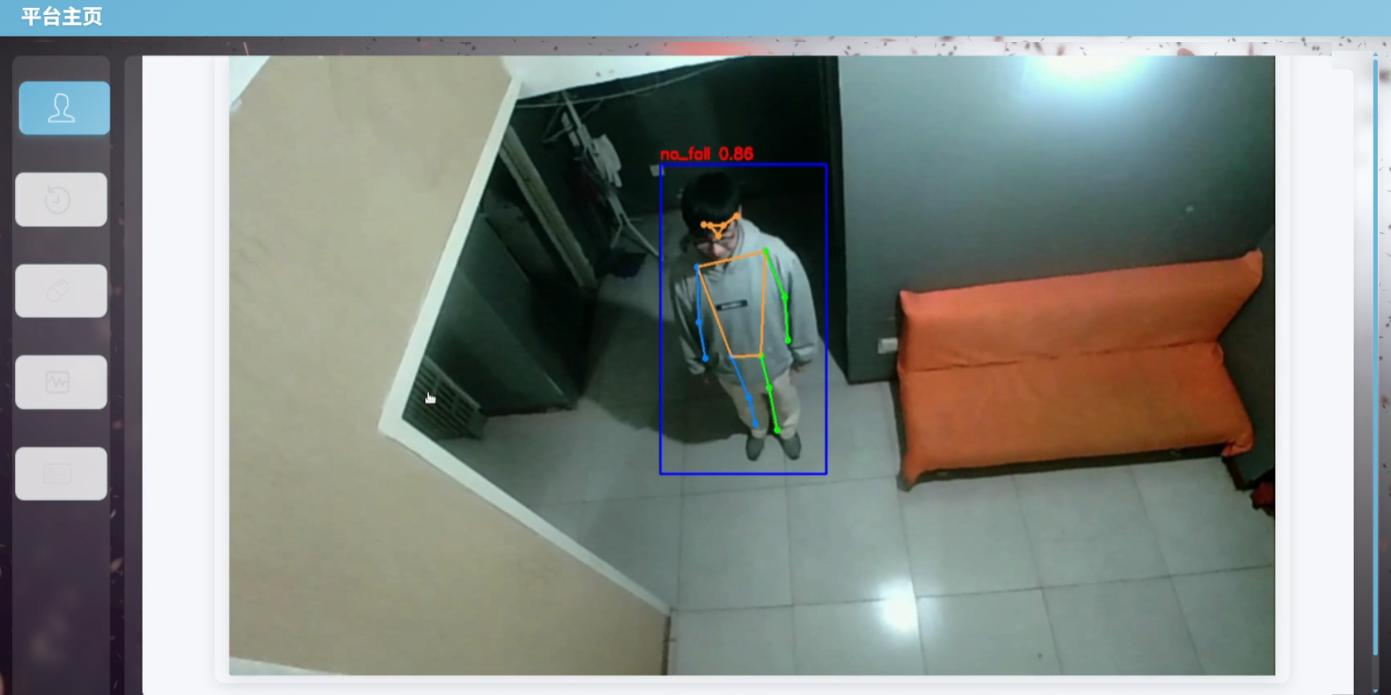
中国老龄化加剧,独居老人面临跌倒致死率高、多病共存等严峻挑战。为此,该团队开发了基于边缘智能与三维姿态估计技术的非接触式、高性价比监护系统,集成跌倒、服药及久坐检测功能。
系统架构:
硬件: 采用【RK3588】ELF 2开发板与OV9732双目摄像头,搭配3D打印外壳。
软件: 技术链涵盖双目视觉(获取深度信息)、自适应光照(抗光线干扰)、优化的YOLOv8(人体检测追踪)、RTMpose(提取17关键点)、三维坐标计算、多级报警机制。
交互: 配备Web可视化界面及四种报警方式。
核心功能:
跌倒检测:融合YOLO置信度(60%)、加速度(20%)与角加速度(20%)加权判断,结合过程分析显著降低睡觉等场景误报。
服药检测:首创全流程证据链,SIFT匹配药盒特征并追踪位置,语音提示,通过手-药(<0.15m)与手-嘴(<0.15m)距离结合状态机精准判定服药动作,覆盖“提醒未服”盲区。
久坐提醒:基于躯干夹角(≥60°)与腿部夹角(≤120°)动作判断,静坐累计达2小时触发语音提醒。
本项目通过创新算法融合与边缘计算,实现了低成本、高精度、多功能的独居老人智能监护,有效应对老龄化社会健康管理难题。

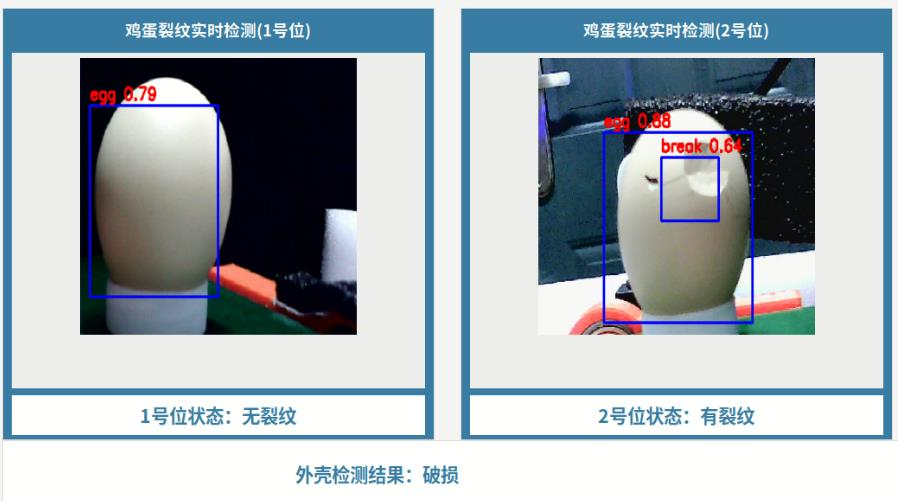
为解决传统鸡蛋质量检测中存在的效率低、主观性强、破坏性操作与分级不准确等问题,该项目打造了一种基于边缘AI的鸡蛋质量智能检测与自动分级系统。系统融合视觉感知与光谱分析双重机制,采用基于YOLOv8-Swin Transformer的先进目标检测算法,对鸡蛋表面微裂纹进行高效识别。该算法结合YOLOv8的高性能检测架构与Swin Transformer的多尺度特征提取能力,具备以下优势:
高精度检测:Swin Transformer在COCO数据集上取得58.7box AP 和51.1mask AP,精准识别蛋壳表面微裂纹;
鲁棒性强:多层次特征与全局注意力机制共同提升模型在复杂光照与多样纹理下的稳定表现;
智能适应:无论是流水线速度的挑战,还是蛋品自然变异带来的干扰,系统均能保持高识别率。

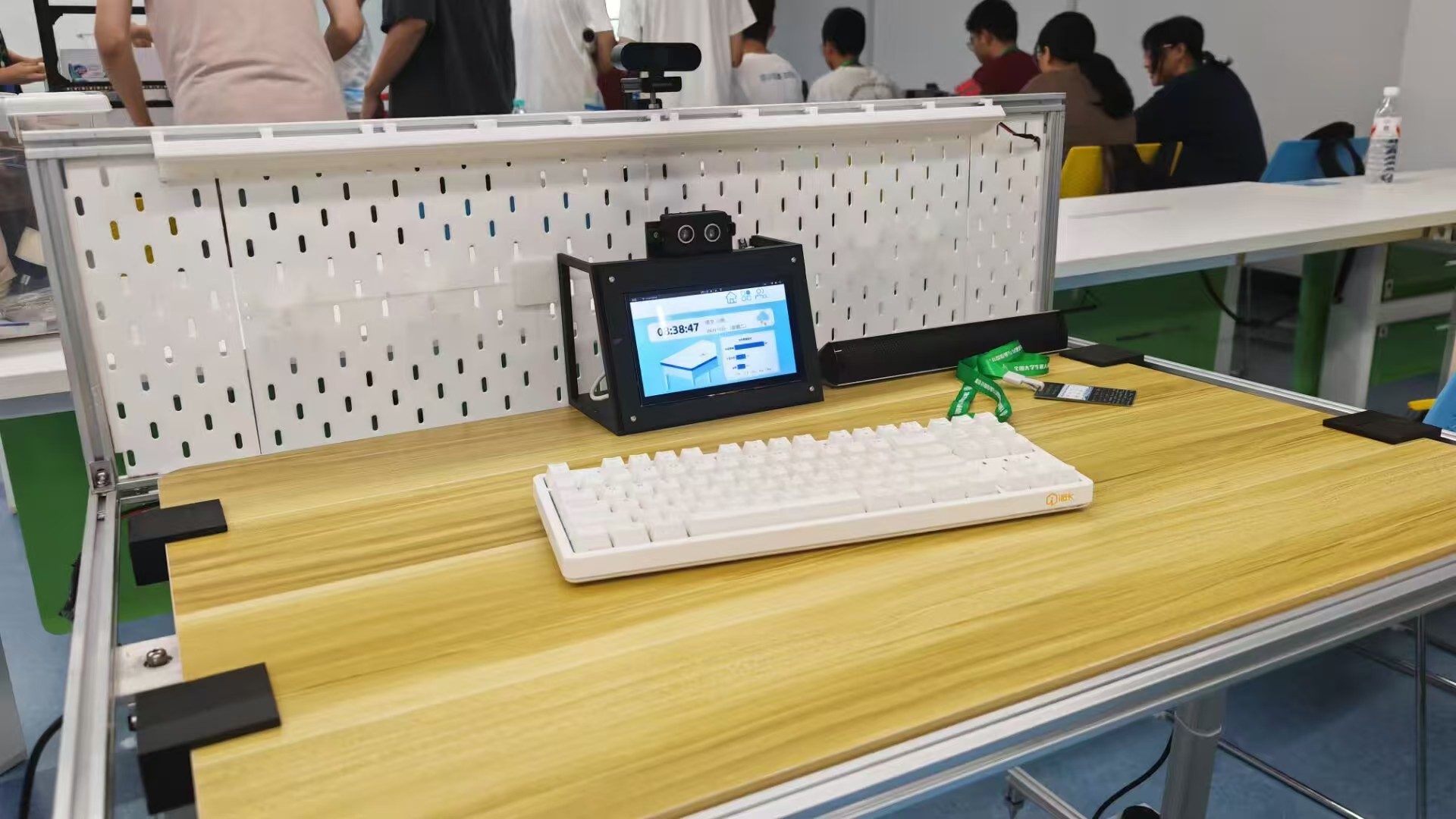
该项目是一款基于【RK3588】ELF 2开发板设计的智能学习辅助系统, 旨在通过多技术融合解决传统学习场景中的效率与健康痛点。系统核心功能涵盖五方面:
1、基于微表情训练集与YOLO模型,检测眨眼频率、打瞌睡、玩手机等行为,超时则触发语音提醒;
2、通过AI视觉与超声波传感器(HC-SR04)实现桌面高度自适应调节,实时监测坐姿并预警;
3、依托TEMT6000传感器与PWM调光技术,实现光照无级调节以保持环境光稳定;
4、结合SHTC3温湿度传感器,通过加热丝将温度控制在舒适范围(最高45℃,精度±0.2℃);
5、通过Qt本地界面与微信小程序记录专注度、玩手机次数等指标,提供个性化学习建议。
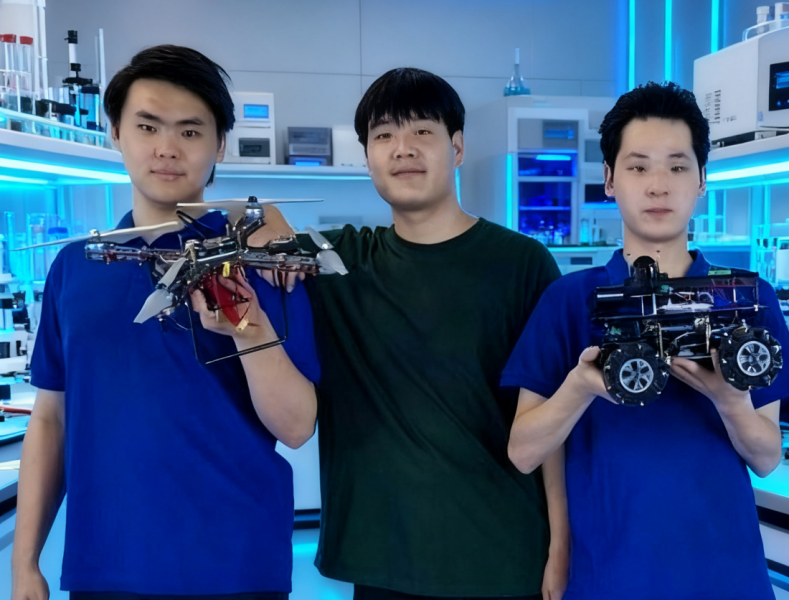
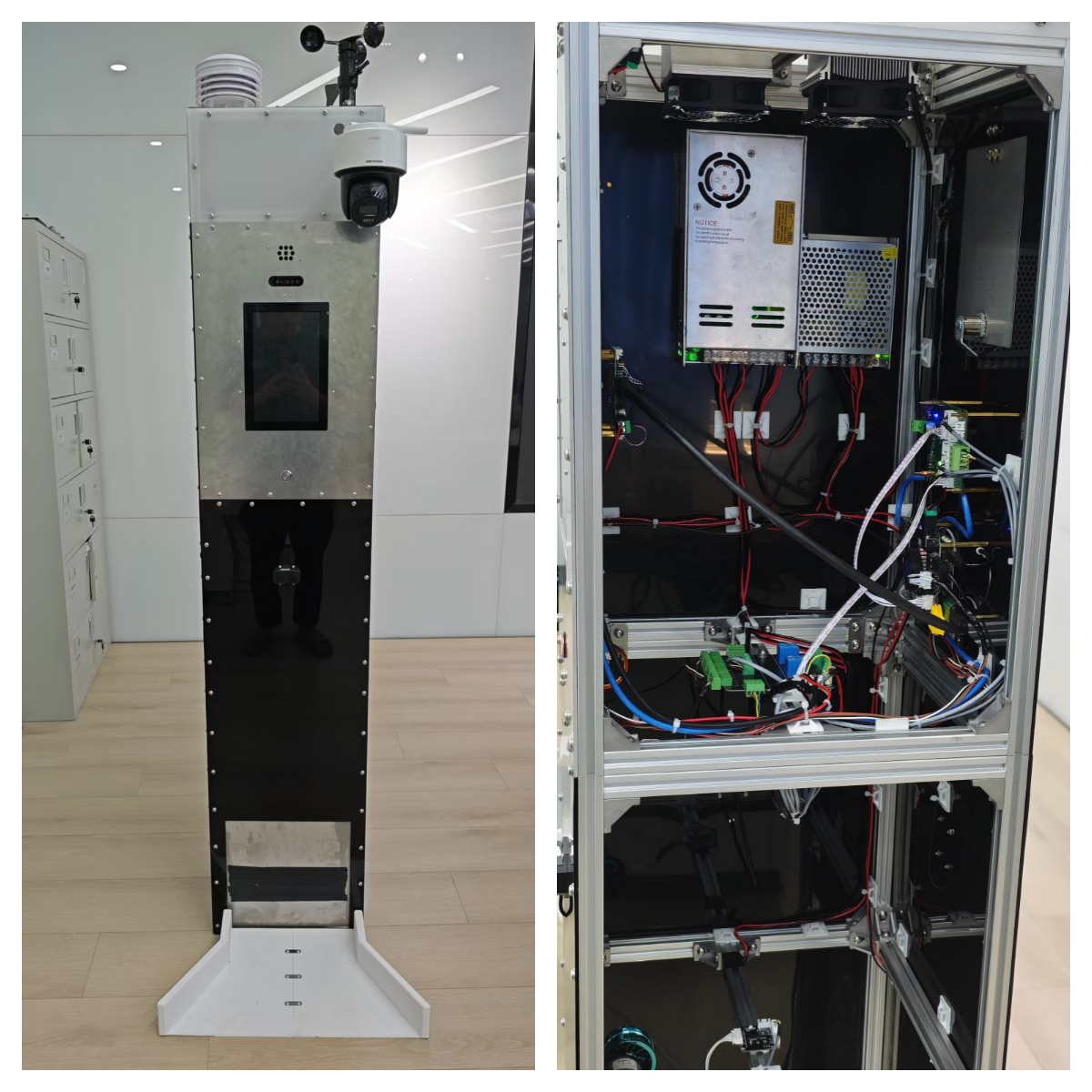
灵眸天枢-多模态协同智慧灯杆系统”是基于嵌入式异构计算架构的城市级智慧基础设施核心节点,以多功能智能灯杆为载体,深度融合环境感知、边缘决策与多设备协同能力。
多模态环境感知:系统集成毫米波雷达、AI摄像头、深度相机、气象传感器等感知单元,通过自主研发的时空对齐协议中间件实现异构数据融合,构建结构化环境模型。支持车辆识别、行为分析、火灾预警、环境监测等多维感知能力。
边缘智能推理:搭载基于瑞芯微RK3588设计的ELF 2开发板,集成6TOPS算力NPU神经网络处理单元,运行轻量化YOLOv11等AI模型,实现车型识别(98%准确率)、跌倒检测、火灾预警等实时边缘AI推理,推理延迟低至35ms。
云边端协同架构:采用三级分布式架构,边缘端负责实时感知与决策,云端基于SpringBoot微服务和GraphQL协议实现万级设备统一管控,支持Kafka消息队列和WebSocket实时通信,确保系统高并发和低延迟响应。
多设备联动响应:通过云端智能调度,实现无人机(定位误差小于1米)与移动机器人(路径响应小于100ms)的协同作业,构建“感知-决策-执行”完整闭环,在火灾、车祸等突发事件中提供快速响应能力。
智能化设备控制:提供模块化硬件设计,功率检测板支持0.1%精度的三合一能源监控,闸门控制板采用增量式PID算法实现精确控制。集成UPS供电系统,续航4小时,应急电源切换时间仅0.1秒。

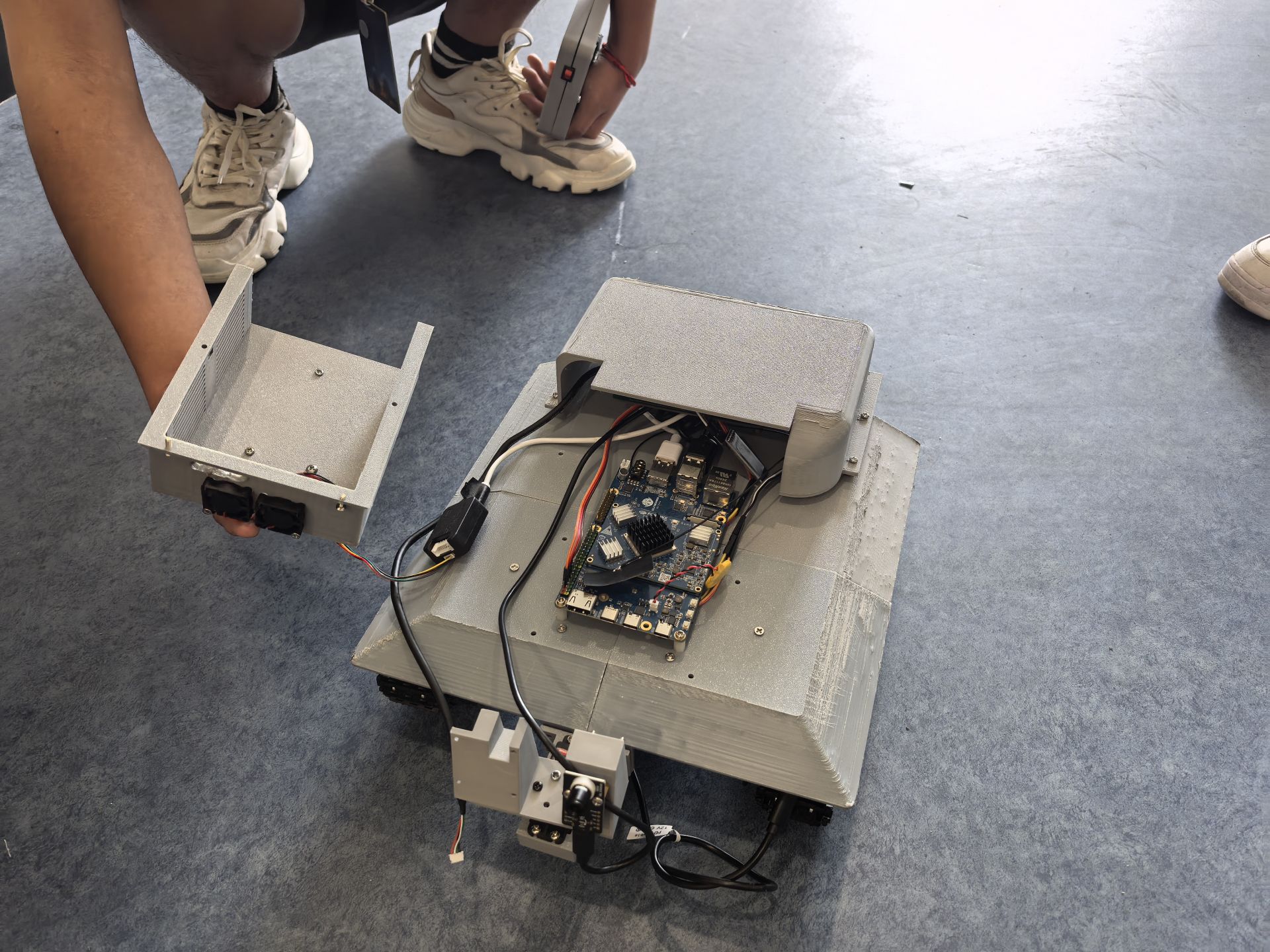
该项目是基于ELF 2开发板设计并实现了一款多功能巡检机器人,旨在为中小型驿站仓库、写字楼等场所提供智能化、自动化的安防巡查服务。系统以ROS 2 Humble版本为核心控制平台,结合slam_toolbox和Navigation 2导航框架实现自主建图与路径规划功能,使机器人能够在复杂室内环境中完成高效巡逻任务。
机器人搭载激光雷达与IMU传感器,通过SLAM技术构建高精度地图,并利用AMCL算法实现定位与导航。在视觉识别方面,采用YOLOv8目标检测模型对环境中的包裹状态、门窗开合情况进行实时识别与分析,有效判断是否存在包裹破损或异常开启情况,提升安全预警能力。
此外,机器人集成MLX90640热成像模块,能够对环境中的热源进行非接触式温度监测,识别异常高温区域,及时发现潜在火灾隐患,实现多维度的安全检测功能。所有检测结果均可通过ROS 2的消息机制上传至远程监控终端,便于管理人员实时掌握现场状况。
整个系统具备良好的可扩展性与稳定性,支持多任务协同运行,并可根据实际应用场景灵活配置功能模块。项目实现了从感知、决策到执行的完整闭环控制流程,展示了机器人在智能安防领域的广泛应用前景,为推动智慧仓储与楼宇管理的自动化升级提供了切实可行的技术方案。





